WAS IST EIN
ENDEFFEKTOR ?
DAS bewährte ROBOTERWERKZEUG - END-OF-ARM-TOOL FÜR VERSCHIEDENE AUFGABEN
Was ist ein Endeffektor und wie verwendet man ihn?
Endeffektoren sind das "arbeitende Ende" eines jeden Roboters.
In diesem Leitfaden erfahren Sie, was sie genau machen und wie man sie benutzt.
Robotersysteme können ziemlich komplex erscheinen, wenn man sie zum ersten Mal benutzt. Die meisten Roboter benötigen eine ganze Reihe von Zubehör und Zusatzgeräten, bevor sie für eine Aufgabe in Ihrem Unternehmen eingesetzt werden können. Bei Endeffektoren oder End-of-Arm-Tools (EOAT) ist es besonders schwierig sich einen Überblick zu verschaffen. Es gibt eine Vielzahl von verschiedenen Endeffektoren von verschiedenen Herstellern auf dem Markt. Was noch verwirrender ist, ist die Tatsache, dass viele Endeffektoren fast genau gleich aussehen, aber sehr unterschiedliche Spezifikationen haben.
In diesem kurzen Leitfaden werden wir einige Grundlagen und Ratschläge zu Endeffektoren erläutern.
Was ist ein Endeffektor?
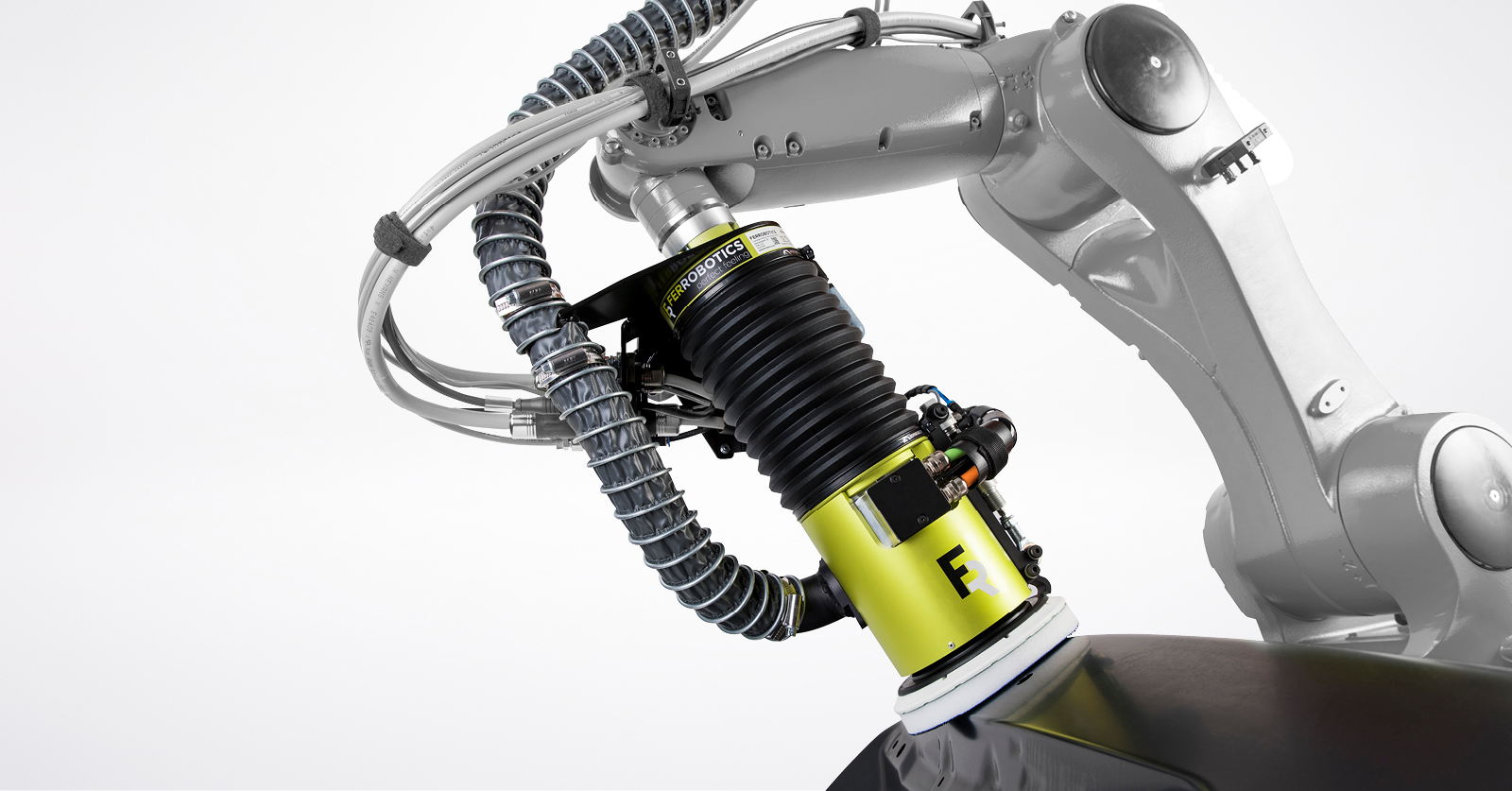
Ein Endeffektor ist ein Peripheriegerät, das am "Handgelenk" eines Roboters befestigt wird und damit ermöglicht seine Aufgabe zu erfüllen. Die meisten Endeffektoren sind mechanisch oder elektromechanisch und dienen als Greifer, Prozesswerkzeuge oder Sensoren. Sie reichen von einfachen Zweifingergreifern für Pick-and-Place-Aufgaben, über komplexe Sensorsysteme für die Inspektion bis hin zu industrietauglichen Schleifwerkzeugen für Roboter.
Es kann auch der Begriff "End Of Arm Tool" (EOAT) verwendet werden. Im Grunde ist ein Endeffektor das "arbeitende Ende" des Roboters. Ohne einen Endeffektor sind die meisten Roboter praktisch nutzlos. Ein Roboter-Gelenkarm kann auf eine bestimmte Stelle in seinem Arbeitsbereich programmiert werden, aber ohne eine Art Endeffektor kann er keine Tätigkeit durchführen.
Die 3 Grundtypen von Endeffektoren
Es gibt so viele verschiedene Arten von Endeffektoren, dass es fast unmöglich (oder zumindest nicht hilfreich) wäre, sie hier alle aufzuführen. Vor allem bei der Oberflächenbearbeitung muss man sich entscheiden, ob man ein passives System (Kraft/Drehmoment) oder ein aktives System mit nachgiebiger Technologie (sensible Kraftnachgiebigkeit) verwendet. Es gibt jedoch 3 Grundtypen, auf die Sie in den meisten Situationen treffen dürften.
Diese Typen sind:
1. Prozesswerkzeuge
Vereinfacht kann man sich Prozesswerkzeuge wie einen Arbeiter vorstellen, der ein Werkzeug bedient.
Während ein Greifer das Werkstück nur fassen kann, verändert ein Prozesswerkzeug das Werkstück tatsächlich.
Es gibt so viele verschiedene Prozesswerkzeuge, wie es verschiedene Arbeitsgänge in der Fertigung gibt. Beispiele dafür sind Schweißroboter, Bearbeitungsroboter, Lackierroboter, 3D-Drucker, Oberflächenbearbeitungswerkzeuge, Polierwerkzeuge, Schleifwerkzeuge und viele mehr.
Wenn Sie es manuell mit einem elektrischen oder pneumatisch betriebenen Werkzeug schaffen, können Sie es sehr wahrscheinlich auch mit einem Roboter automatisieren. Und sollten Sie es mit einer anderen automatisierten Maschine bearbeiten, können Sie das auch meistens mit einem Roboter unterstützen oder Automatisierungslücken schließen.
2. Greifer
Der gebräuchlichste Roboter-Endeffektor ist der normale Greifer. Er ermöglicht das Aufnehmen und Manipulieren von Objekten und eignet sich daher am besten für Aufgaben wie Pick-and-Place, Montage und Maschinenbedienung. Es gibt wahrscheinlich mehr verschiedene Arten von Greifern als jede andere Art von Endeffektoren. Am weitesten verbreitet sind Fingergreifer, die mit 2, 3, 4 oder 5 Fingern ausgestattet sind. Es ist möglich, 6 oder mehr Finger zu verwenden, aber nur selten notwendig. Dann gibt es noch Vakuumgreifer, Magnetgreifer, Nadelgreifer, und es werden ständig neue, erstaunliche Greifertechnologien entwickelt.
3. Sensoren
Sie können auch einen Sensor anbringen, um den Roboter als programmierbares Sensor-Orientierungsgerät zu verwenden. Dies ist besonders nützlich für Anwendungen wie die Roboterinspektion, bei der die Inspekteure weniger Zeit für die Datenerfassung aufwenden müssen. Viele Sensoren können als Endeffektor eingesetzt werden, z. B. Ultraschallsensoren, Laserscanner, 2D- und 3D-Kameras und Infrarotsensoren (wie sie bei der NASA verwendet werden).
Extra: Werkzeugwechsler
Obwohl sie technisch gesehen nicht zu den Endeffektoren zählen, werden Werkzeugwechsler ebenfalls am Ende des Roboters angebracht - zwischen dem Handgelenk (Flansch) und dem Endeffektor. Sie ermöglichen es dem Roboter, selbstständig zwischen verschiedenen Werkzeugen zu wechseln.
Ein System mit Kegelwechsler funktioniert jedoch anders:
Mit dem Laden des Videos akzeptieren Sie die Datenschutzerklärung von YouTube.
Mehr erfahren
<BEISPIELVIDEO von einem Kegelwechselsystem> (LinkedIn)
Hier ist die Anschlusswelle des Endeffektors so konfiguriert, dass sie Kegelwerkzeughalter aufnehmen kann und verfügt über eine ausfallsichere pneumatische Werkzeughalterfreigabe. Sollten für ein Werkstück mehr Werkzeuge benötigt werden, können diese schnell vom Werkzeug-Magazin aufgenommen werden. Die Wechselzeit beträgt nur wenige Sekunden und erfolgt vollautomatisch. Anschließend wird sofort mit dem nächsten Schritt der Bearbeitung begonnen. Bürsten, Trennen, Schleifen, Exzentern, Polieren uvm. Eine große Auswahl an Werkzeugen liefert ausreichend Möglichkeiten für jede erdenkliche Art der Oberflächenbehandlung.
Welcher Endeffektor ist der Richtige für Sie?
Es gibt so viele verschiedene Endeffektoren, dass es ziemlich verwirrend sein kann, zu wissen, welcher für Ihre spezielle Anwendung der beste ist. Um auf der sicheren Seite zu sein und für zukünftige Aufgaben gerüstet zu sein, sollten Sie ein System mit aktiver Nachgiebigkeit wählen.
Hier erfahren Sie mehr:
Kraftkontrollierte Endeffektoren
Mit "Kraftkontrollierten" Geräten können Sie Prozesse automatisieren und einem Industrieroboter das "Gefühl" ähnlich einer menschlichen Hand verleihen. Ihr bewegliches Element (Hub) ermöglicht es mit einer bestimmten Kontaktkraft an der Oberfläche des Teils zu arbeiten und diese auch konstant zu halten. Diese Technologie ist ein geschlossener Regelkreis, der unabhängig vom Roboterarm arbeitet. Im Gegensatz zu Kraft-Drehmoment-Sensoren muss diese Vorrichtung nicht die Masse des Roboterarms bewegen. Stattdessen wird nur das Gewicht am Ende des beweglichen Elements berücksichtigt. Das macht diese Roboterwerkzeuge schneller, genauer, präziser und einfacher zu bedienen als andere Geräte auf dem Markt. Stellen Sie sicher, dass jedes Werkzeug über eine absolute Kalibrierung (künstliche Konditionierung) verfügt, die einen konstanten Prozess für mehrere Zellen (Roll-out) oder Ersatzgeräte auf der ganzen Welt garantiert. Dies ist von entscheidender Bedeutung, wenn es um Anwendungen der Oberflächenbearbeitung (Schleifen, Polieren, Entgraten, Schweißnahtentfernung) geht, bei denen Konsistenz (Wiederholbarkeit) der Schlüssel zum Erreichen eines schönen Oberflächenergebnisses ist.
Aktiv nachgiebige Technologie (Active Compliant Technology)
Automatisierte Active Compliant Technology Tools verwenden eine interne Regelung mit Rückkopplung sowie interne Kraft-, Beschleunigungs- und Positionssensoren, um die gewünschte Kontaktkraft präzise auf Ihr Werkstück auszuüben. Die genaue Kraft wird auch bei komplexen Konturen und in jeder Ausrichtung beibehalten. Sie stellen ein welche Kraft Sie konstant wünschen und ein aktives Werkzeug wird diese nach oben, unten oder in jeder beliebigen Richtung beibehalten. Die aktive Nachgiebigkeit muss vom Benutzer eingestellt werden und ist für jeden Anwendungsprozess unterschiedlich. Die Einstellung erfolgt in der Regel über die Softwareprogrammierung der Servo-Gelenke und unter Verwendung von Sensoren (Vision-Sensoren, Kraftsensoren, Drehmomentsensoren usw.). Diese Familie von Nachgiebigkeitsmethoden zielt auf eine größere Flexibilität im Fertigungsprozess ab.
Passive Technologie
Automatisierte passive Werkzeuge sind einfache, billige Geräte mit offenem Regelkreis. Meistens sind sie auf externe, vom Kunden bereitgestellte Druckluftregler angewiesen, um die angewandte Kraft einzustellen. Auch wenn sie nicht die ultrahohe Präzision und Flexibilität der aktiven Nachgiebigkeit bieten, eignen sie sich hervorragend für weniger anspruchsvolle flache oder prismatische Teile oder speziellere Prozesse wie das Schaben von Schweißnähten, bei denen eine hochpräzise Kraftsteuerung nicht erforderlich ist. Die passive Nachgiebigkeit wird während der Einrichtung der Roboterzelle angewendet und bleibt im Hintergrund immer aktiv, um ihre Sicherheitsfunktion zu erfüllen. Sie kann der Struktur des Roboters inhärent sein, wie eine Drehmomentbegrenzung am Endeffektor oder eine Drehmomentbegrenzung an den Gelenken. Es kann sich auch um eine Art Kollisionsdetektor handeln, der verhindert, dass es zu Kollisionen kommt oder dass diese schädlich sind. Diese Vorrichtungen dienen der Sicherheit und sind wichtig, wenn eine Mensch-Roboter-Kollaboration beabsichtigt ist.
Wann brauche ich Kontaktkraftkontrolle bzw. Nachgiebigkeit?
In der Industrierobotik bezieht sich der Begriff Nachgiebigkeit auf Flexibilität und Geschmeidigkeit. Um zu definieren, was Nachgiebigkeit ist, ist die Definition von "nicht nachgiebig" hilfreich. Ein nicht nachgiebiger (steifer) Roboter-Endeffektor ist ein Gerät, das für vorgegebene Positionen oder Bahnen ausgelegt ist. Unabhängig davon, welche Art von äußerer Kraft ausgeübt wird, folgt der Roboter-Endeffektor jedes Mal genau demselben Weg. Ein nachgiebiger Endeffektor kann dagegen mehrere Positionen erreichen und unterschiedliche Kräfte auf ein bestimmtes Objekt ausüben.
Mit dem Laden des Videos akzeptieren Sie die Datenschutzerklärung von YouTube.
Mehr erfahren
Zur Verdeutlichung: Ein aktiv nachgiebiger Schleifroboter behält genau die Kraft bei, die für einen perfekten Materialabtrag oder eine perfekte Oberflächenbearbeitung erforderlich ist, selbst bei komplex geformten Geometrien ohne entsprechende Einstellungen, da er die Oberflächenunregelmäßigkeiten selbst ausgleicht. Ein nicht nachgiebiges Schleifwerkzeug schlägt zu hart auf die Oberfläche auf oder hebt ab, weil der Roboter einen Fehler erkennt (d. h. er verliert den Kontakt zum Werkstück bzw. zur Oberfläche). Er geht dann in Standby bzw. "Safety Stop" oder setzt seine Arbeit einfach fort >> Das kann zur Beschädigung des Materials und des Roboterwerkzeugs führen. Und die erneute Inbetriebnahme kostet wertvolle Zeit in der Produktion.
Mit dem Laden des Videos akzeptieren Sie die Datenschutzerklärung von YouTube.
Mehr erfahren
Warum aktive Nachgiebigkeit?
Viele industrielle Roboterprozesse erfordern Flexibilität, wenn nicht gar Bewegungsfreiheit in bestimmten Richtungen. Das Be- und Entladen einer Maschine erfordert beispielsweise Bewegungsfreiheit in zwei Achsen (um zu verhindern, dass die Teile zerdrückt werden, wenn sie falsch ausgerichtet sind) und keine Bewegungsfreiheit in der Be- und Entladerichtung.
Möglicherweise möchten Sie auch aktiv nachgiebige Technologie für Anwendungen wie Schleifen, Polieren, Entgraten, Endbearbeitung usw. einsetzen. Solche Prozesse benötigen eine aktive Nachgiebigkeit, da sie sich von einem Teil zum anderen unterscheiden. Man möchte nicht einen nicht-nachgiebigen Roboter für ein bestimmtes Teil verwenden und für das nächste Teil ein völlig anderes Ergebnis erzielen.
Kompensation der Schwerkraft
Um für zukünftige Aufgaben gerüstet zu sein, sollten Sie prüfen, ob der Endeffektor, mit dem Sie arbeiten, die Schwerkraft kompensieren kann.

Ein Active Compliant Tool balanciert die Nutzlast in jeder Orientierung in Echtzeit aus. So haben Sie immer die definierte Kraft ohne komplexe Programmierung. Das ist ein großer Vorteil. Es handelt sich um eine echte Kraftregelungstechnologie für die sensible robotergestützte Materialentfernung wie Schleifen, Schleifen, Entgraten und für andere Aufgaben in Ihrer Welt der Robotik und Automatisierung.
Sollten Sie einen Schleifroboter oder eine Schleifmaschine verwenden?
Wenn ja, welcher Typ ist der beste und welche Spezifikationen braucht er?
Aktives oder passives Prozesswerkzeug?
Welcher Typ?
Leider lautet die Antwort wirklich: Es kommt darauf an.
Um zu bestimmen, welcher Endeffektor für Ihre Anwendung am besten geeignet ist, müssen Sie einen Schritt zurücktreten und sich fragen: Was wollen wir mit dieser Aufgabe erreichen?
Den richtigen Endeffektor auswählen
Wenn Sie sich auf den Zweck der Aufgabe konzentriert haben, gehen Sie folgendermaßen vor:
- Bestimmen Sie, welche Aktionen der Roboter ausführen muss, um die Aufgabe zu erfüllen.
- Erstellen Sie eine Auswahlliste der verschiedenen Arten von Endeffektoren, die diese Aktionen ausführen könnten.
- Bewerten Sie jeden Typ hinsichtlich Kosten, Programmieraufwand und anderer relevanter Faktoren.
- Wählen Sie schließlich den Endeffektor aus, der den Anforderungen dieser speziellen Aufgabe am besten entspricht.
Es kann mehrere Möglichkeiten geben, dieselbe Aufgabe mit verschiedenen Roboter-Endeffektoren zu erledigen.
Denken Sie zum Beispiel an eine Aufgabe zur Oberflächenbearbeitung. Einerseits könnte man einen Schleifeffektor als Prozesswerkzeug am Handgelenk des Roboters befestigen, was einfach zu bewerkstelligen wäre. Andererseits könnten Sie einen Greifer verwenden, um das Teil zu einer montierten Schleifmaschine zu bringen (Teil-zu-Werkzeug), wodurch der Roboter schnell zu einer anderen Aufgabe übergehen könnte und kein spezieller Endeffektor erforderlich wäre.
Keine der beiden Optionen ist falsch, es kommt nur darauf an, was Sie brauchen. Das können Teile sein, die in einer bestimmten Zeit produziert werden müssen oder die benötigte Endqualität.
Wie Sie einen Endeffektor mit Ihrem Roboter verwenden
Jeder Endeffektor wird auf eine etwas andere Weise bedient. Sie verwenden unterschiedliche Kommunikationsprotokolle, unterschiedliche Programmierschnittstellen und erfordern unterschiedliche Fähigkeiten, um sie zum Laufen zu bringen.
Die grundlegenden Schritte für die Verwendung jedes Endeffektors mit einem Roboter sind:
- Befestigen Sie den Endeffektor am Handgelenk (Flansch) des Roboters oder Cobots.
- Anbringen aller Anschlüsse, z. B. elektrisch, pneumatisch oder hydraulisch.
- Anbringen der Kommunikationsschnittstellen (zwischen Endeffektor und Robotersteuerung, z.B. Plug-in)
Achten sie darauf ob der Roboterhersteller sogenannte Zertifikate oder ein gemeinsam entwickeltes Plug-In für den Endeffektor zur Verfügung stellt.
Einige Beispiele:
Universal Robots UR+
FANUC Partner Devices Program
Doosan Mate
Techman certified
und viele mehr ...
Einbindung der Endeffektor-Programmierung in das Roboterprogramm.
Dieser letzte Schritt (Programmierung) war bisher oft die größte Herausforderung. Aber jetzt nicht mehr! Die Programmierung eines Endeffektors muss nicht schwierig sein. Mit der richtigen Roboterprogrammiersoftware können Sie eine Version eines beliebigen Endeffektors in nur 5 Minuten zum Laufen bringen.
Mit RoboDK oder Automappps können Sie zum Beispiel ganz einfach die Pfadprogrammierung mit dem passenden Endeffektor erstellen, indem Sie das 3D-Modell laden und es per Drag-and-Drop auf Ihren Roboter ziehen. Damit lassen sich die am Bauteil benötigten Bearbeitungsschritte und Abläufe vorher perfekt offline simulieren und später für die Produktion vorbereiten.
Wo Platz
ist für Ver-
besserung,
Fühlen wir uns am Wohlsten.
IHRE ANFRAGE AN FERROBOTICS
Der bestmögliche Kontakt zu Ihnen ist uns wichtig. Unsere Experten stehen Ihnen mit ihrem Know-how gerne zur Verfügung. Senden Sie jetzt Ihre Anfrage an den Weltmarktführer für sensitive Robotik:
